
Neuromechanical control of mobility in a novel task: Handwalking
Purpose: Development of mobility training interventions to maintain independence
After an injury, the onset of a neuro-degenerative disease, or simply during healthy ageing, there is an increase in mobility impairments. These are associated with a loss of independence and reduced quality of life. The purpose of this project is to develop mobility training interventions to empower subjects of all ages to achieve and maintain independence in their daily activities.
Previous work: Mobility relies on appropriately positioning the body centre of mass (CoM)
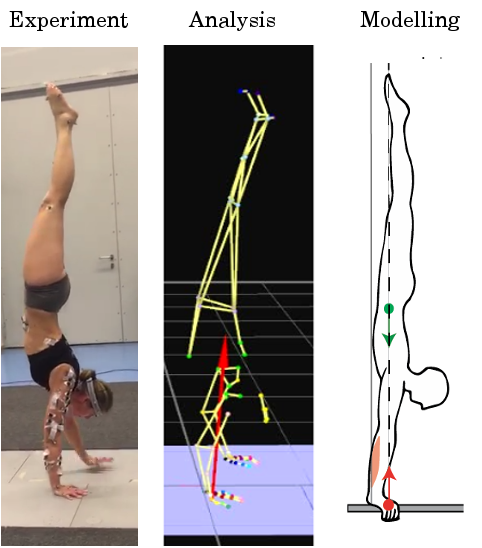
To move effectively, a person must control the external forces acting upon the body. During stance, these are the ground reaction force and the person’s weight (Figure 1, right panel, red and green arrows respectively). Previous work (Le Mouel and Brette 2017) has shown that, in order to initiate walking effectively, subject must first lean forwards during stance. Then, they must contract their muscles in the right order, starting from the muscles closest to the ground then moving upwards along the body. This skill takes children several years to learn, while their body grows and their muscle mass and strength increase.
Current work: Neuromechanical control of handwalking
We study how adults - who have finished their growth - learn the postural coordination to perform a non-habitual task, specifically standing and walking on their hands. We combine experiments, analysis and modelling to elucidate the neuromechanical control of handwalking.
Publications:
Le Mouel, C., and Brette, R. (2017). Mobility as the Purpose of Postural Control. Front Comput Neurosci 11, 67. doi.org/10.3389/fncom.2017.00067