The aim of the research is to induce a movement from evidence based therapeutic approaches towards science based therapeutic approaches in conservative and surgical treatment in both orthopedic and sports medicine.
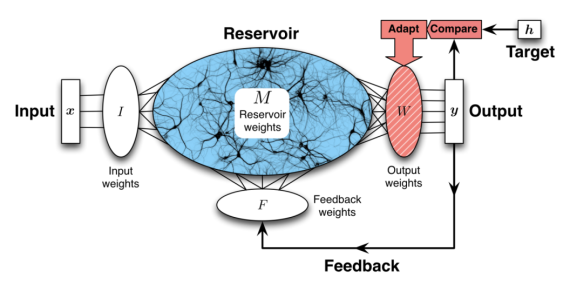
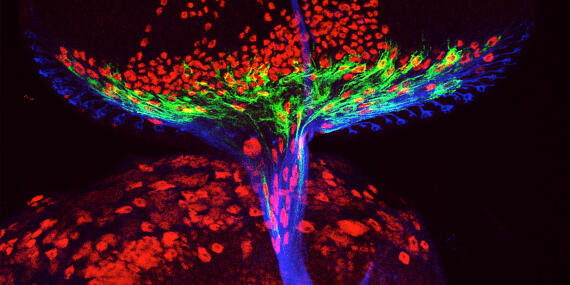
Our lab uses machine learning techniques to research varied movement science topics, from the use of neural networks as spinal cord models, to more applied studies such as pose-estimation and golf research.