We consider two variational models for transport networks, an urban planning and a branched transport model, in both of which there is a preference for networks that collect and transport lots of mass together rather than transporting all mass particles independently. The strength of this preference determines the ramification patterns and the degree of complexity of optimal networks. Traditionally, the models are formulated in very different ways, via cost functionals of the network in case of urban planning or via cost functionals of irrigation patterns or of mass fluxes in case of branched transport. We show here that actually both models can be described by all three types of formulations; in particular, the urban planning can be cast into a Eulerian (flux-based) or a Lagrangian (pattern-based) framework.
We consider two variational models for transport networks, an urban planning and a branched transport model, in which the degree of network complexity and ramification is governed by a small parameter ε>0. Smaller ε leads to finer ramification patterns, and we analyse how optimal network patterns in a particular geometry behave as ε tends to 0 by proving an energy scaling law. This entails providing constructions of near-optimal networks as well as proving that no other construction can do better.
For those proofs we explore variations of a simple technique based on convex duality. For an alternative proof in two dimensions we furthermore establish a close relation of network optimisation to Mumford-Shah image segmentation, which results in the interesting fact that the two-dimensional network optimisation problems actually admit a convex reformulation.
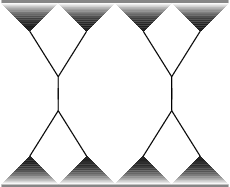
Optimal fine-scale structures in compliance minimization for a shear load
R. Kohn and B. Wirth; Communications in Pure and Applied Mathematics 2015. [pdf]
We consider the variational problem of finding a two-dimensional shape or elastic structure that minimizes a weighted sum of volume, perimeter, and compliance, which is the inverse stiffness of the structure with respect to a fixed prescribed load. In this article we restrict ourselves to the case of a uniform shear load imposed on a fixed rectangular boundary. This optimal design problem is not only of interest in engineering, but could also serve as a basic variational model to better understand biological structures such as trabecular bone geometries: Biological materials such as bones often exhibit very fine structures which in our variational model are associated with a very small perimeter penalization weight ε. Instead of numerically computing optimal geometries, which is very difficult due to the strong non-convexity of the problem, we prove how the energy of the optimal geometries scales with ε. The proof includes the construction of a near-optimal geometry, which in our case of a shear load is based on a dyadic branching pattern at two different spatial scales. This construction provides some insight into how optimal geometries could look like qualitatively and quantitatively.
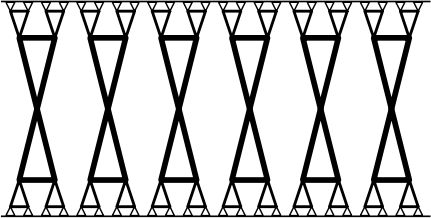
Optimal fine-scale structures in compliance minimization for a uniaxial load
R. Kohn and B. Wirth; Proceedings of the Royal Society A 470(2170):20140432-20140448, 2014. [pdf]
We consider the optimization of the topology and geometry of an elastic structure O⊂R2 subjected to a fixed boundary load, i. e. we aim to minimize a weighted sum of material volume vol(O), structure perimeter per(O), and structure compliance comp(O) (which is the work done by the load). As a first simple and instructive case, this article treats the situation of an imposed uniform uniaxial tension load in 2D. If the weight ε of the perimeter is small, optimal geometries exhibit very fine-scale structure which cannot be resolved by numerical optimization. Instead, we prove how the minimum energy scales in ε, which involves the construction of a family of near-optimal geometries and thus provides qualitative insights. The construction is based on a classical branching procedure with some features unique to compliance minimization. The proof of the energy scaling also requires an ansatz-independent lower bound, which we derive once via a classical convex duality argument (which is restricted to 2D and the uniaxial load) and once via a Fourier-based refinement of the Hashin-Shtrikman bounds for the effective elastic moduli of composite materials. We also highlight the close relation and the differences to shape optimization with a scalar PDE-constraint and to the pattern formation observed in intermediate states of type-I superconductors.
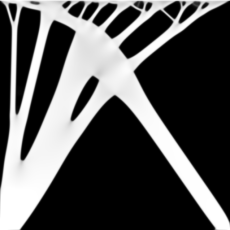
A phase-field model for compliance shape optimization in nonlinear elasticity
P. Penzler, M. Rumpf, and B. Wirth; ESAIM: COCV 18(1):229-258, 2012. [pdf]
Shape optimization of mechanical devices is investigated in the context of large, geometrically strongly nonlinear deformations and nonlinear hyperelastic constitutive laws. A weighted sum of the structure compliance, its weight, and its surface area are minimized. The resulting nonlinear elastic optimization problem differs significantly from classical shape optimization in linearized elasticity. Indeed, there exist different definitions for the compliance: the change in potential energy of the surface load, the stored elastic deformation energy, and the dissipation associated with the deformation. Furthermore, elastically optimal deformations are no longer unique so that one has to choose the minimizing elastic deformation for which the cost functional should be minimized, and this complicates the mathematical analysis. Additionally, along with the non-uniqueness, buckling instabilities can appear, and the compliance functional may jump as the global equilibrium deformation switches between different bluckling modes. This is associated with a possible non-existence of optimal shapes in a worst-case scenario.
In this paper the sharp-interface description of shapes is relaxed via an Allen-Cahn or Modica-Mortola type phase-field model, and soft material instead of void is considered outside the actual elastic object. An existence result for optimal shapes in the phase field as well as in the sharp-interface model is established, and the model behavior for decreasing phase-field interface width is investigated in terms of Γ-convergence. Computational results are based on a nested optimization with a trust-region method as the inner minimization for the equilibrium deformation and a quasi-Newton method as the outer minimization of the actual objective functional. Furthermore, a multi-scale relaxation approach with respect to the spatial resolution and the phase-field parameter is applied. Various computational studies underline the theoretical observations.