Shoedeloe

The supposed benefits of barefoot running are an often debated topic, with many studies investigating footwear influences on the kinematics and kinetics of running. Few studies, however, have analysed the effect on joint contact forces (JCFs). In this study, we investigated the influence of different footwear on the JCFs of the hip, knee, and ankle during running using a 3D musculoskeletal model.
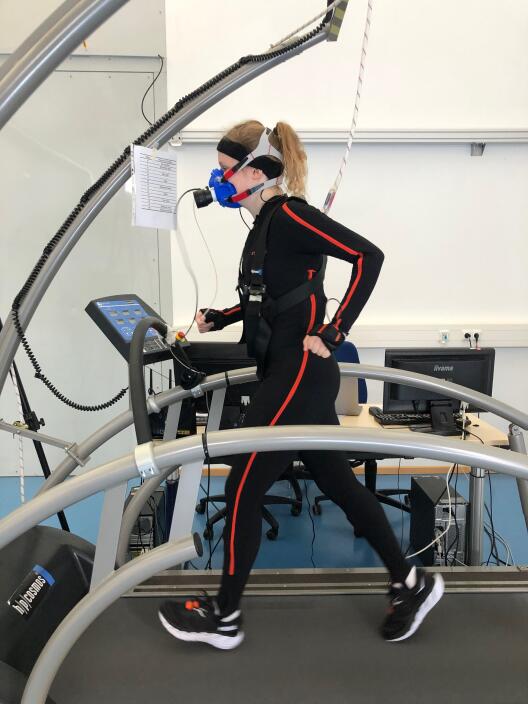
Kinematics were recorded from 16 volunteers while running on a treadmill at two speeds (2.0 m/s and 2.5 m/s) either barefoot (BF), wearing minimal shoes (MM), or normal shoes (NS). Alongside the JCFs, stride parameters and joint angles were examined using a generalised linear mixed model.
Results showed a decrease in the hip JCF from BF to MM to NS, no consistent changes in the knee and an increase from BF to MM to NS at the ankle. However, these changes mostly had small effect sizes, so it’s unclear how relevant they are. The individual responses were much larger and showed opposite effects, indicating that the effects of footwear are highly individual and probably depend on the running style and characteristics of each runner.
This project is already puplished as an article in Scientific reports.
Project Leader: Lena Kloock & Andrea Arensmann