Our research brings together topics from a diverse array of subject areas under the unified theme "intelligent representation and processing of geospatial information". We are particularly interested in understanding the techniques that human agents employ to structure spatial knowledge and use this understanding to provide better methods for interacting with GI systems.
Recognition and alignment of sketch maps
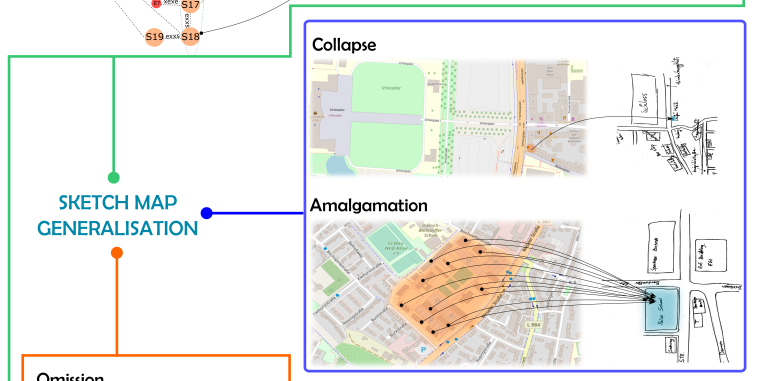
Sketch maps are usually drawn at a more abstract level than metric maps, often aggregating regions that in metric maps would be seperate and aggregating spatial relations that in metric maps would be more precisely determined. Error-tolerant matching methods must therefore be used to account for differences in levels of abstraction inorder to improve the quality of alignment. For the semantic recognition of sketch map objects, we develop algorithms to extract the location and the meaning of objects within the images. On this level the research covers low level and mid level image processing techniques as well as high level images understanding methods. Sketch maps are often considered as externalizations of cognitive maps. Thus, sketch maps appear to have similar characteristics as cognitive maps: They are schematized and distort directions, distances, size, and shapes.
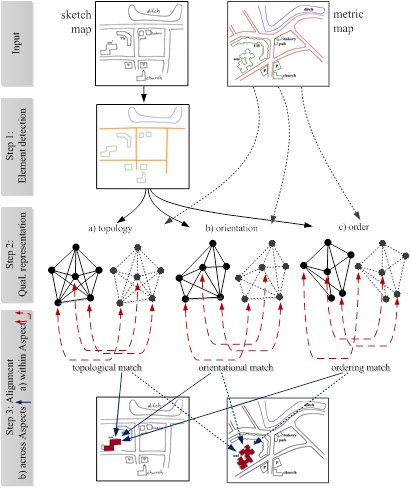
This research investigates the reliability and accuracy of sketching aspects for aligning sketch maps automatically with the corresponding real-world configurations represented on metric maps. Reliable qualitative sketching aspects indicating orientation, distance, topology, serial or cyclic order are extracted and formalized using existing qualitative calculi. SketchMapia aims at qualitative representations that are robust against schematizations and distortions, and provide a basis for qualitative alignment of spatial objects from sketch maps with those from metric maps. Qualitative alignment of a pair of sketch maps involves matching the qualitative constrain networks of the pair such that the greatest possible number of qualitative constraints is satisfied.
Cognitive Wayfinding Assistance and Spatial Learning
Research on cognitively enabled wayfinding has led to new path planning algorithms computing easyto-follow routes with descriptive instructions. Nevertheless, current research still adheres to the principles of traditional navigation systems: routes are given as sequences of instructions that users need to execute step-by-step. Instead of forming a logical sequence of instructions embedded in the overall task, each instruction is isolated and reduced to a minimum of information content. The user’s wayfinding task is cut down to executing predetermined actions at given locations.
This research direction suggests new wayfinding assistance systems that support the acquisition of spatial knowledge and cognitive map-making for advancing the user’s orientation in unfamiliar environments. Wayfinding instructions are to be embedded in the context of the environment and the overall task. Instructions enriched with information that can be related to the user’s cognitive map helps users to get and remain orientated. This makes wayfinding more successful because it enables users to take informed spatial decisions for circumnavigating traffic, taking shortcuts or including spontaneous detours. Our research determines which context information advances orientation of users and how this information has to be represented.