© BoströmComputational Movement ScienceThe focus of the Computational Movement Science (CMS) Lab lies on model-based analyses of various aspects of human movement and perception.
© Lena FennenClinical BiomechanicsThe aim of the research is to induce a movement from evidence based therapeutic approaches towards science based therapeutic approaches in conservative and surgical treatment in both orthopedic and sports medicine.
© dragon30/Photocase.comActive AgeingUnderstanding the changing physical capacities of persons of older age is crucial in maintaining quality of life.
© clafouti / Photocase.comPsychomotor learning & developmentWe investigate how perceptual motor skills develop during young age.
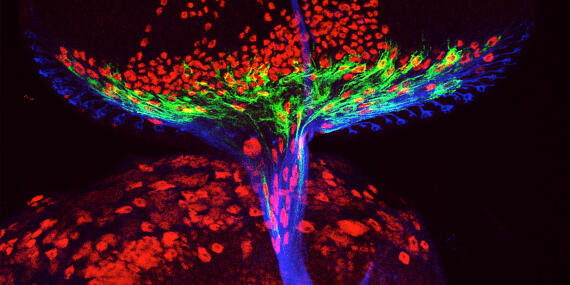
© CiM - Anni Bauke, Christian KlämbtEvolution and MovementOur sensorimotor system is the product of a non-goal-directed movement and arises through a gradual process of growth.
© National Photo Company [Public domain]Applied Movement ScienceWe aim to better understand our ability to perform goal-directed movements.